


设备概况
型号:WS-CXF-250
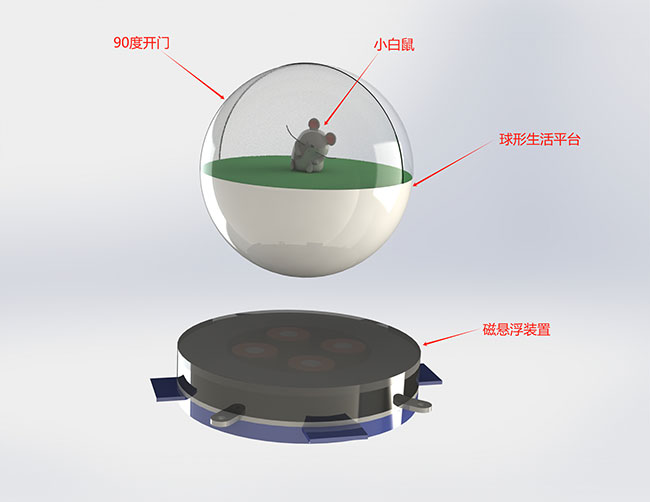
将小白鼠圈养在球形生活平台内。采用磁悬浮原理,使得球形平台悬浮空中。
设备模块化设计,1个球形平台生活1只小白鼠,配备一套磁悬浮装置。
如需对多个小白鼠进行试验,则将多套试验机一起使用即可。
并且扩展性强,可附加其他模块,以加强试验能力,如生物监测监控,温湿度环境控制等。
2. 技术参数
(1) 球形生活平台:内径250mm。球内附加水平平台用于小白鼠生活。
(2) 悬浮原理:磁悬浮。
3. 磁悬浮原理与计算解析
3.1. 电磁力计算基础
磁悬浮系统的核心在于电磁力与重力的平衡。以下为关键计算模型:
电磁吸引力(EMS系统)
计算公式:
Fem=μ0N2AI2/4d2
其中,μ0为真空磁导率(4π×10−7 H/m),N为线圈匝数,A为磁极面积,I为电流,d为悬浮间隙。通过调节电流强度实现间隙稳定(典型值8-12mm)。
超导排斥力(EDS系统)
基于楞次定律,运动超导磁体在铝制轨道中感应涡流,产生反向磁场形成的斥力:
Fed=B2A/2μ0
式中B为磁感应强度,A为有效作用面积。悬浮间隙可达10-30cm。
3.2. 控制算法与稳定性分析
PID闭环控制
悬浮间隙调节采用PID算法:
u(t)=Kpe(t)+Ki∫e(t)dt+Kdde(t)/dt
参数整定需满足相位裕度>45°,带宽>100Hz,响应时间<10ms。
多自由度协同控制
横向导向力与纵向推进力耦合方程为:
{mx=Fx−Fdrag my=Fy+Flateral
需通过卡尔曼滤波器消除轨道不平顺扰动,定位精度要求±1mm67。
3.3. 能量损耗量化分析
电磁悬浮能耗
功率损耗主要来自线圈电阻:
Ploss=I2R+B2fV/μ0σ
其中R为线圈电阻,f为磁场交变频率,V为磁芯体积,σ为材料电导率。EMS系统典型功耗为3-5kW/吨。
超导系统冷却能耗
液氦制冷功率需求:
Pcool=Qleak/ηcryo
漏热Qleak与绝热层厚度成反比,商用超导磁悬浮制冷效率约15%-20%。
4. 系统设计原理
4.1. 磁悬浮模块
悬浮机制:采用电磁悬浮(EMS)技术,通过可调节电流的电磁铁阵列实现小白鼠无接触悬浮,磁场强度与重力平衡关系满足:
Fm=μ0N2AI2/4d2≥mmouse⋅g
其中,mmouse为小白鼠质量(约20-40g),悬浮间隙d控制在5-10mm范围内,通过PID算法实时调节电流以维持稳定悬浮。
磁场配置:采用环形电磁铁阵列(4-6组),垂直磁场强度梯度≥0.5T/m,水平方向设置辅助磁场抑制侧向偏移。
4.2. 动态行为监测
运动轨迹捕捉:集成微型加速度计(采样率≥100Hz)与红外光栅阵列(精度±0.1mm),实时记录小白鼠肢体活动轨迹及位移。
生理参数监测:通过非接触式光纤传感器监测心率(50-700bpm)与呼吸频率(20-300次/分),数据同步至控制终端。
5. 核心功能模块
5.1. 环境模拟系统
磁场强度调节:支持0.1-5.0T连续可调磁场,通过PWM控制电磁铁电流(0-10A),模拟不同重力条件(如0.1g-2g)。
温湿度控制:内置恒温模块(20-30℃±0.5℃)与湿度调节器(30-70%RH±5%),适应长期实验需求。
5.2. 安全保护机制
紧急制动:悬浮失效时自动启动机械托架(响应时间<50ms),防止小白鼠跌落损伤。
刺激阈值保护:动态限制电磁场变化速率(ΔB/Δt≤0.1T/s),避免过度应激反应。
6. 硬件与软件架构
6.1. 硬件配置
悬浮平台:直径200mm圆形平台,采用轻量化钛合金框架(总重<5kg),内置电磁铁组与传感器阵列。
控制单元:基于STM32H7微控制器,集成16位ADC(采样率1MHz)与CAN总线通信模块。
6.2. 软件系统
实时控制算法:采用改进型模糊PID控制器,调节周期≤1ms,相位裕度>60°,带宽>200Hz。
数据分析模块:支持运动轨迹可视化(3D建模)与生理参数相关性分析(如活动强度与心率变化曲线)。
7. 实验流程设计
7.1. 适应性训练阶段
初始悬浮高度设定为5mm,磁场强度梯度0.3T/m,持续30分钟/天,连续3天观察行为适应性与应激反应。
7.2. 生存能力测试
静态悬浮测试:在1g模拟重力下连续悬浮24小时,记录能量消耗(通过运动位移换算)与进食/饮水行为。
动态应激测试:施加周期性磁场扰动(频率0.1-10Hz),评估运动恢复速度与生理指标波动。

业务咨询:18702252422
Copyright © 2018 天津伟思实验仪器科技有限公司.版权所有 ![]()
服务热线







